_Web.jpg)
multiplex-rc-history
Technische Beschreibung MULTIPLEX-101
Detailbetrachtung der Fernsteuerung:
Weiter wollen wir uns nun der detaillierten System und Funktionsbeschreibung des Multiplex-101 zuwenden. Ich werde die einzelnen technischen Erklärungen aus dem Bericht von H. Feulner entnehmen und zitieren. Wo nötig werde ich Skizzen und Bildmaterial einfügen, um ein abgerundetes Bild zu erzeugen. Diese Seite ist sehr ausführlich und damit sehr lang. Nehmen Sie sich Zeit beim lesen und nachvollziehen der doch recht komplexen Erklärungen.
W. Feulner beginnt mit der Systembeschreibung der Multiplex-101. [...Mit der Multiplex-101 lassen sich gleichzeitig (simultan) 4 Proportionalfunktionen steuern. Die Anlage ist also vollsimultan und vollproportional. Volldigital kann man sie, der derzeit (1965/66) üblichen Begriffsetzung entsprechend nicht nennen; denn die Servos arbeiten analog. Die Übertragung der Ruderkommandos jedoch geschieht nach einer der neueren digitalen Methoden...]. Mit dem letzten Satz ist das Zeit-Multiplex-Verfahren gemeint.
Der Sender:
Abb. 1 Sender Multiplex-101 mit laufender Nummer 132

Abb.2 Grundsätzlicher Impulszyklus und elektronische Arbeitsweise des Impulsteils des Senders
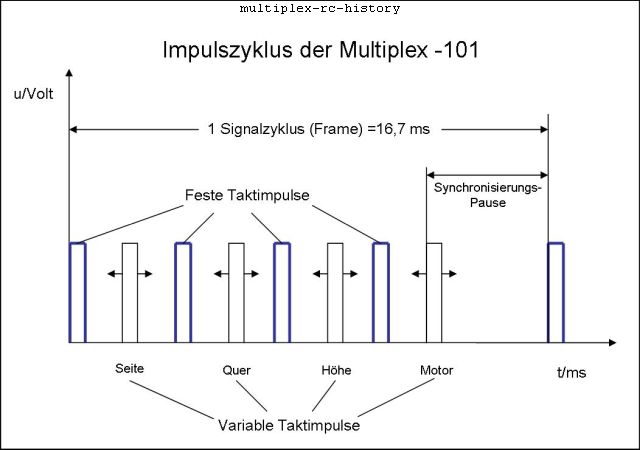
[... In Abb. 2 ist der Impulszyklus der Anlage dargestellt. Er besteht grundsätzlich aus 8 kurzen Impulsen, wovon 4 Impulse feste Taktimpulse sind, die die Kanalzuordnung ergeben; bei den 4 anderen Impulsen handelt es sich um variable Ruderimpulse, die der Proportional-Information entsprechen....].
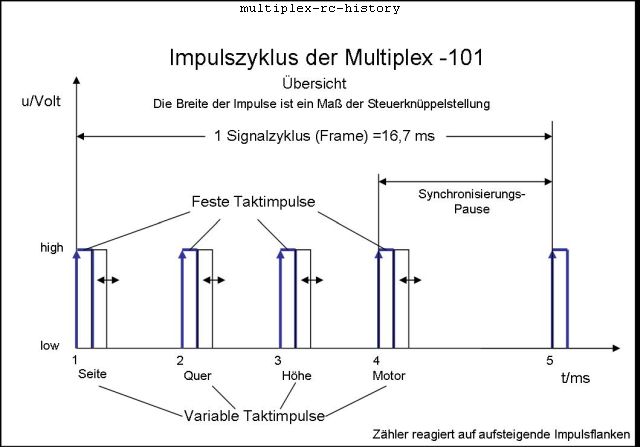
Zum besseren Verständnis der realen Verhältnisse in der Fernsteuerung habe ich die Abb.2a gefertigt, die noch mal alle Elemente, die wir im folgenden von W. Feulner kennenlernen beinhaltet.
Abb.2a Übersicht Impulszyklus zusammengefasst
[... Der erste Impuls (1.Taktung) im Zyklus kommt zu einer festgesetzten Zeit und bedeutet den Beginn sowohl der Übertragungszeit als (auch) den Beginn der ersten Ruderfunktion oder des ersten Proportionalkanals (hier Seitenruder). Nach einer gewissen Zeit folgt der 1. Kanalimpuls als sogenannter Antwortimpuls auf den ersten Impuls; er bestimmt durch seinen zeitlichen Abstand zu Letzterem die Stellung des Seitenruders im Modell....].
Hiermit ist die Steuerknüppelstellung, repräsentiert durch die Impulsbreite gemeint. Siehe Abb.2a.
[... Dann kommt der 3.Impuls (2.Taktimpuls), der den Beginn des nächsten Kanals (Querruder) bestimmt; der 4.Impuls (2. variabler Kanalimpuls) des Zyklus steuert schließlich die Stellung des Querruders usw. Der Impulszyklus setzt sich folglich aus 4 zeitlich festen Taktimpulsen, die die jeweilige Kanalzuordnung herstellen und aus 4 variablen Kanalimpulsen, die die Stellung des betreffenden Ruders bestimmen, zusammen...].
[ Zum besseren Verständnis dienen die Blockschaltbilder und Impulsdiagramme der Anlage. In Abb.3 ist das Blockschaltbild des Senders, in Abb.4 das Impulsdiagramm des Senders zu sehen....].
Abb.3 Blockschaltbild des Senders
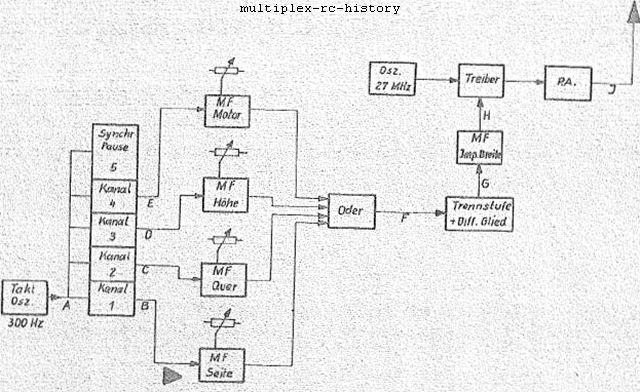
Lassen Sie uns mit der Beschreibung des Blockschaltbildes beginnen.
[... Ein Taktoszillator, der auf 300 Hz arbeitet, steuert einen 5 stufigen FF Zähler (FF = Flip Flop) an (man vergleiche jeweils die Stellen A,B,C, ...., an denen das Signal im Schaltbild auftritt, und die dazugehörenden Signale Signale A,B,C,... im Impulsdiagramm). An den Ausgängen des Zählers erscheinen nun der Reihe nach Rechteckimpulse mit einer Länge von 6,6 msec, die die einzelnen Kanal-Monoflops (MF) ansteuern...].
Gemeint sind im Impulsdiagramm die Impulse der Buchstaben B,C,D,E. Dieser Takt ist hier halbiert (Frequenzteiler) worden, deshalb 6,6 ms. Das sind 150 Hz. Diese Impulse gehen in die Monoflop Stufen.
[... Auch die 5. Zählerstufe würde einen solchen Impuls ergeben; da er jedoch nicht weiter verwendet wird, folgt nach dem 4.Kanal die erforderliche Synchronisierungspause. Die Kanal-Monoflops werden jeweils zu Begin des betreffenden Zähler-Ausgangsimpulses B...E angesteuert; sie geben dann Ausgangsimpulse ab, deren Länge über die mit den Steuerknüppeln gekoppelten Potentiometer eingestellt werden kann. Durch Zusammensetzen der MF-Ausgangsimpulse in einem Oder-Gatter bekommt man die Impulsfolge F, die die einzelnen Kanalzeiten (t1...t4 enthält...].
Das Ausgangssignal F beinhaltet alle Informationen, die jetzt geschickt zum Empfänger gebracht wird. Hier beginnt bereits die Aufbereitung für die Weiterverarbeitung. an dieser Stelle könnte jetzt auch eine Drahtverbindung zum Empfänger sein (Diagnose ohne HF). Die aufsteigenden Flanken der Signale sind immer in einem festen zeitlichen Abstand (3,3 ms).
Abfolge von Signal F : 3,3 ms mit t1, 3,3ms mit t2, 3,3ms mit t3, 3,3ms mit t4, 3,3ms Pause. Dann Wiederholung des Frames.
Abb.4 Impulsdiagramm des Senders
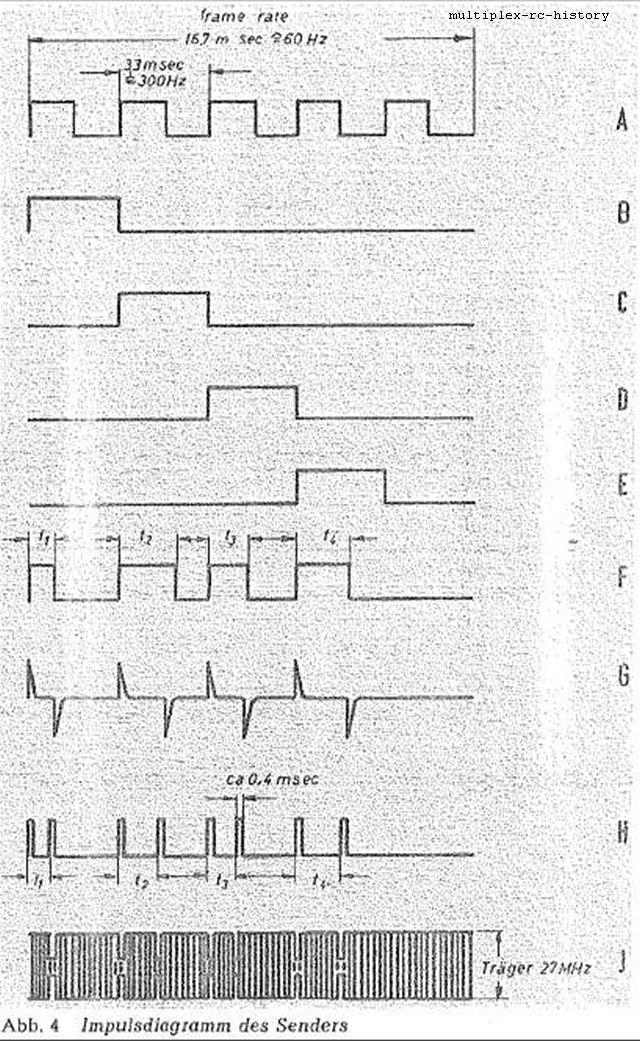
Doch lassen Sie uns den Ausführungen von W. Feulner weiter folgen.
[... Die Anstiegsflanken dieser Impulse haben gleiche Abstände zueinander, während die Impulsenden zeitlich variabel sind. Die Impulsenden entsprechen somit der Proportionalinformation im Impulszyklus F. Nach passieren einer Trennstufe und eines Differenziergliedes ergibt sich das Signal G. Durch Differenzieren sind aus den Impuls-Anstiegen (F) positive, aus den Impuls-Enden negative Spitzen geworden. Diese Spitzenimpulse steuern ein weiteres Monoflop (MF, Impulsbreite an, wobei jeweils die positiven und die negativen Spitzen des Signals G einen kurzzeitigen Impuls im Ausgangssignal H hervorrufen....].
Sieht man sich das Ausgangssignal H definierter an, so findet man eine konstante Impulsbreite von 0,4 ms. Diese wird durch das Monoflop konstant eingestellt.
[... Der 1., 3., 5. und 7. Impuls in diesem Zyklus entspricht den positiven Spitzen-Impulsen in G bzw. den Impulsanstiegen in F. Diese Impulse sind also zeitlich fest und ergeben, wie oben erwähnt, die zeitliche Kanalzuordnung (Zeit-Multiplex-Verfahren). Jeweils der 2., 4., 6. und 8. Impuls im Zyklus H entspricht den negativen Spitzen in G und den Impuls-Enden in F. Diese Impulse lassen sich folglich durch die Steuerknüppel und Geberpotentiometer zeitlich verschieben und enthalten die Proportionalinformation (Ruderstellungs-Information der betreffenden Kanäle)...].
Im weiteren werden wir nun die Ansteuerung der Hochfrequenzstufe verstehen lernen. Hierzu habe ich das Schaltbild ( aus Modell 2/1966, E. Rabe) der Hochfrequenzstufe (Abb 4a) unten angefügt.
Abb 4a. Hochfrequenzstufe Multiplex-101 gezeichnet von E. Rabe
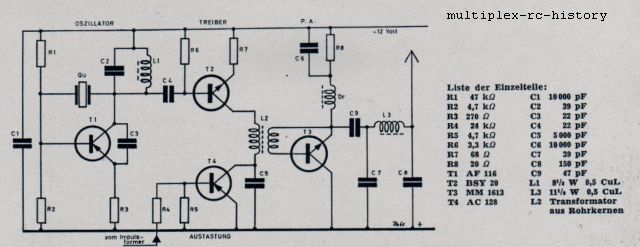
Man sieht deutlich die Leitung vom Impulsformer (Signal H), wie es den Transistor T4 (PNP) beeinflussen kann. Jedes Mal, wenn Signal H Spannung führt, wird T4 leitend und somit der 27 Mhz Träger unterbrochen. Siehe auch das 27 Mhz Impulsbild J.
[... Mit den kurzen Impulsen des Zyklus H (Dauer ca 0,4 msec) wird nun der durchlaufende Träger ausgetastet (Signal J). Diese Methode ist schon von anderen Anlagen her bekannt; sie trägt beträchtlich zur Verbesserung der Störsicherheit auf dem Übertragungsweg vom Sender zum Empfänger bei Ein weiterer Vorteil gegenüber dem einfacheren Übertragungsverfahren der Impulsfolge F: Wenn die Impulsflanken auf den Übertragungsweg verschliffen werden, ändert sich die Kanalinformation nicht, da sie als Abstand gleichartiger Impulsflanken (hier Vorflanke) gegeben ist. Der HF Teil des Senders besteht aus einem Quarzoszillator, der mit Steckquarzen der 6 internationalen HF Kanäle des 27 MHz- Bandes betrieben wird, und aus einer Treiberstufe die die Oszillatorspannung für eine kraftvolle Ansteuerung der Endstufe verstärkt und in der die Modulation des HF-Trägers vorgenommen wird. Es schließt sich in üblicher Weise die PA-Stufe (Endstufe) an, die die endgültige Ausgangsleistung des Senders bereitstellt und die Antenne mit Zentral-Belastungsspule (CLC-Antenne) speist....]
Somit ist sicherlich der Sender der Multiplex-101 von seiner elektronischen Arbeitsweise vorerst mal hinreichend erklärt.
Einige technische Daten sollten hier noch stehen:
Spannungsversorgung: 12 V DKZ Accumulator, Stromaufnahme: 130 mA, Sendergewicht: 1800 g, Sendeleistung: 500 mW, Quarzgehäuse: HC 6 U, Frequenzband: 27 MHz. Temperaturbereich: +50°C bis -10°C, Spannungsbereich: +8V bis +15V.
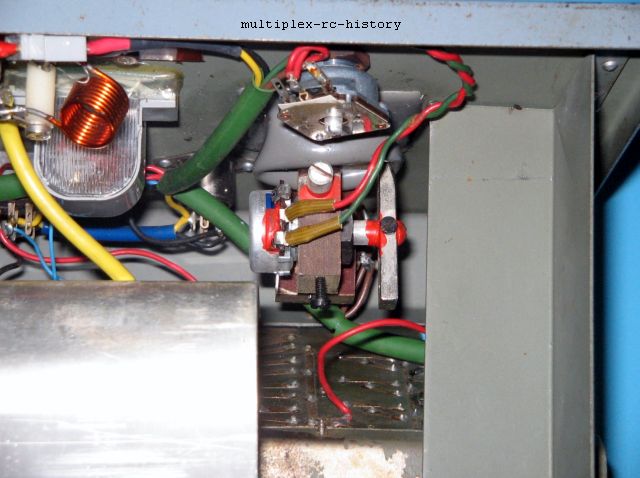
Lassen Sie uns noch ein wenig in den Sender hineinschauen und die Mechanik ansehen. Da sind zu Beispiel die Knüppelmechaniken als interessant anzusehen. Deutlich sieht man auf Abb.5 die Hartpapierhalterungen, die am Gehäuseoberteil mit 2 Schrauben verschraubt sind ( Abb.1) und mechanisch die Seiten/Querruderpotentiometer aufnehmen. Diese Potentiometer haben eine ca 100 mm lange Achse auf der wiederum eine Hartpapierkonstruktion befestigt ist, die die Motor/Höhenruder Potentiometer aufnehmen. Die Trimmpotis sind mit den Steuerpotis in Reihe geschaltet. Siehe Abb.6.
Abb. 5: Deutlich sieht man das Potentiometer für das Querruder (hinten) und die lange Achse.
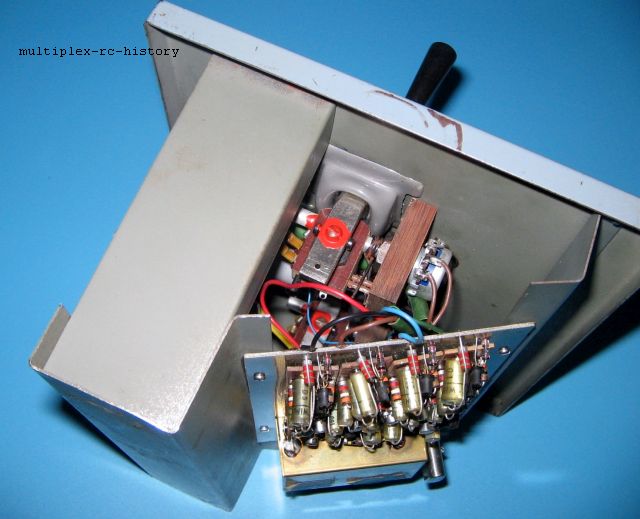
Abb 6: Deutlich sieht man die "kardanische" Aufhängung der Potentiometer und Steuerknüppel über Hartpapierhalterungen. Nach Werksjustage sind die Potentiometer mit rotem Sicherungslack gesichert worden. Die Trimmpotis (Querruder oben vorne ) sind mit den Steuerpotis in Reihenschaltung verkabelt worden. Deutlich sieht man das Potentiometer für die Motordrossel (Hartpapier links).
Die massive Metallkonstruktion für das Gehäuse hat mit zum Hauptgewicht des Senders beigetragen.
Nach oben
Der Empfänger:
Im weiteren wollen wir genauso, wie den Sender den Empfänger betrachten. Abb.7 zeigt den Multiplex-101 Empfänger mit der HF Platine oben. Abb. 7a zeigt den Empfänger mit beiden Platinen. Oben der HF Teil und unten die Decoderplatine.
Abb.7: Multiplex-101 Empfänger HF Platine
Abb.7a: Multiplex-101 Empfänger

W.Feulner beschreibt den Empfänger:
[... In Abb.7b u. 8 sind das Blockschaltbild und das Signaldiagramm des Empfängers dargestellt. Im Empfängereingang ein konventioneller Superhet für das 27 MHz Band mit Mischstufe, Quarzoszillator (für Steckquarze auf den 6 HF Kanälen), 2-stufigen ZF-Verstärker, Demodulator und anschließendem 3-stufigen Impulsverstärker und Amplitudenbegrenzer. Die automatische Verstärkungsregelung wirkt auf 2 Stufen. Am Ausgang des Begrenzers erhält man das Signal E (Abb. 7b), das dem Signal H in Abb. 4 bis auf die Polarität gleicht...].
Abb.7b: Blockschaltbild des Empfängers
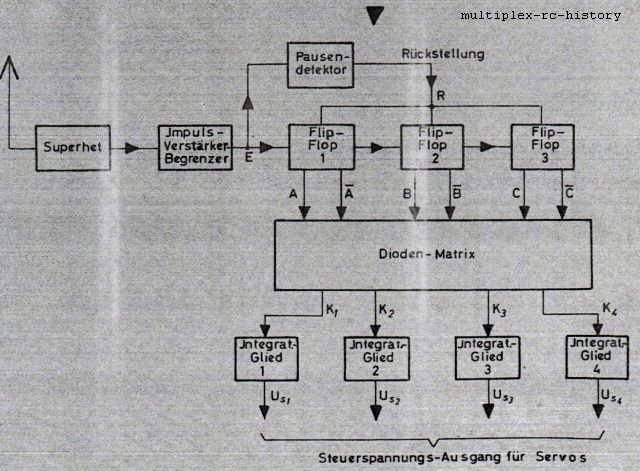
Abb.7c: Beschreibung des Pausendetektors von E. Rabe
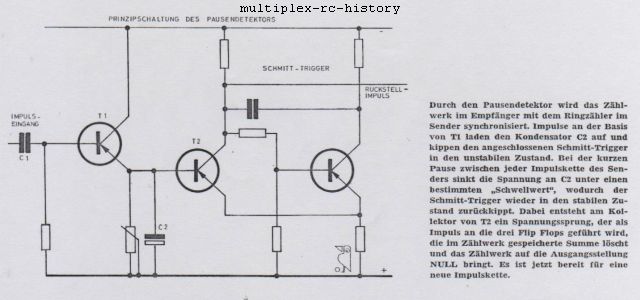
Abb.7d: Beschreibung der Diodenmatrix von E. Rabe
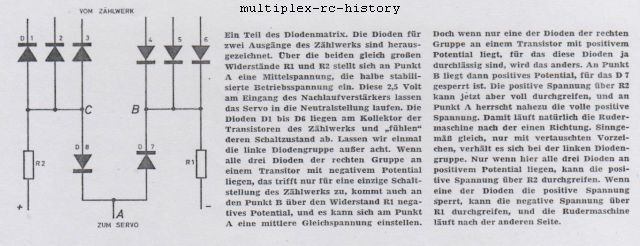
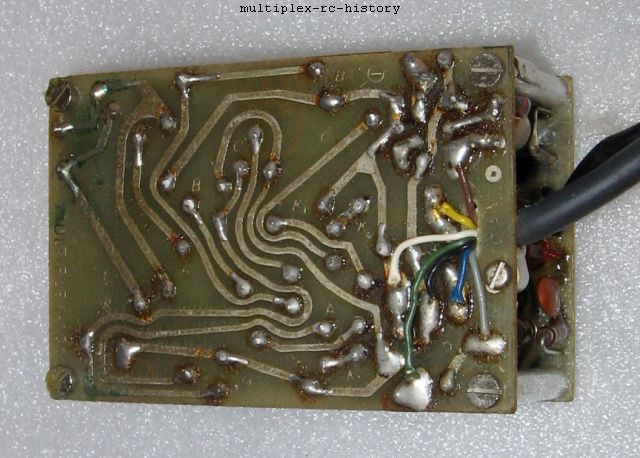
Abb. 7e: Decoderplatine Empfänger. Siehe auch die Buchstaben auf der Platine.
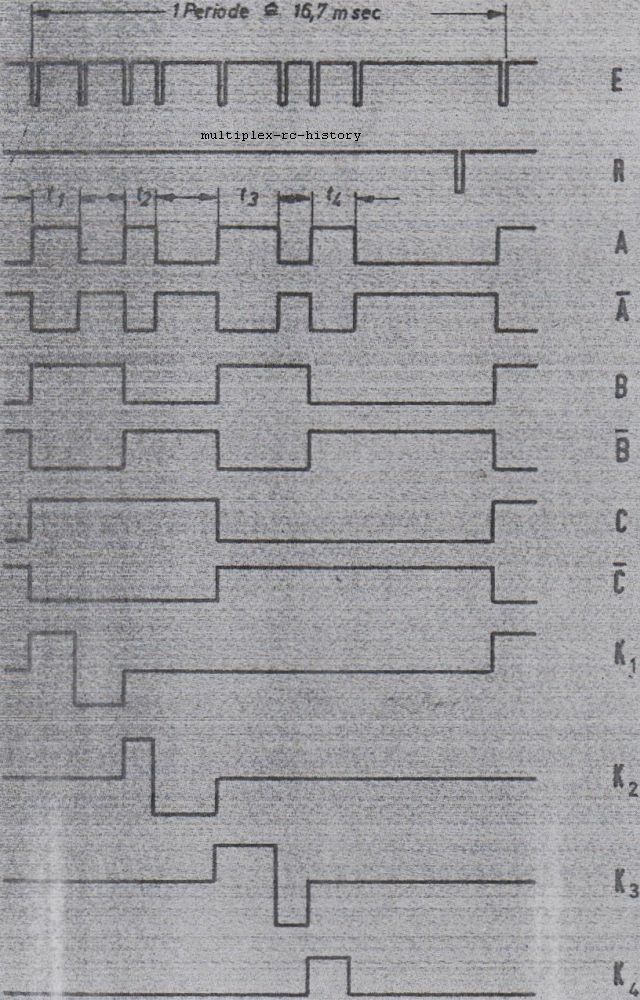
[... Dieser Impulszyklus E steuert einen 3-stufigen FF Zähler an. Durch die 1:2 Frequenzuntersetzung im FF1 (FF = Flip Flop) ergibt sich die Rechteck-Impulsfolge A, die schon im Sender vorhanden war (Signal F in Abb.4). ...]
Oben bei Abb.4 hatte ich bereits beim Signal F bemerkt, dass dies Signal schön für eine Kabeldiagnose wäre. Hier sehen wir jetzt die Empfangsseite für das Signal F, nämlich das Signal A, welches identisch zu F ist. Hier könnte man also die Diagnoseleitung einspeisen.
[... In jeder FF-Stufe erfolgt eine weitere Impulsuntersetzung der gewohnten Art. Die auf diese Weise entstehenden Signale A...C werden in der Diodenmatrix positiv und negativ decodiert. Es ergeben sich sich Ausgangsimpulse K1--K4, von denen wir als Beispiel den Ausgangsimpuls K1 weiter betrachten wollen. Die Zeit vom ersten bis zum zweiten Impuls von E, also die Einschaltzeit des betreffenden Kanal-Monoflops im Sender, wird positiv decodiert und ergibt einen positiven Rechteckimpuls im Signal K1; die Zeit zwischen dem 2. und 3. Impuls der Folge E, also die Zeit zwischen Abfall des 1. Kanal-MFs im Sender und Einschalten des 2. Kanal-MFs, wird negativ decodiert; ein negativer Impuls im Signal ist die Folge. ...]
[...Entsprechendes gilt auch für die restlichen 3 Proportionalkanäle, wobei zu bemerken ist, dass das Signal K4 (Motordrossel) nur einen positiven decodierten Anteil erhält....]
Abb.8: Impulsdiagramm des Empfängers
Kommen wir nun zu den Ansteuerungen der analogen "Nachlauf" Servos. Die folgenden Zeilen beschäftigen sich damit, wie aus den decodierten Signalen die Steuerspannung für die Servostellung gewonnen wird. Also aus den Signalen K1 bis K4 eine Steuerspannung Us entsteht, die wiederum proportional der Steuerknüppelstellung am Sender sein muss.
[... Die Signale K1 ...K4 passieren nun noch je ein hauptsächlich aus einem Kondensator bestehendes Integrationsglied, dass die rechteckige Impulsform zu einem Gleichspannungsmittelwert glättet. Die Höhe diese Gleichspannungsmittelwertes ist abhängig vom Verhältnis der positiv und negativ decodierten Spannungszeitflächen des betreffenden Kanalsignals K1 ...K4....]
[... Angenommen, im Fall des Kanal 1 sei die die Einschaltzeit des Kanal-MFs im Sender gerade so lang, wie die nachfolgende Pause, was der Knüppel-Neutralstellung entspricht (Signal F in Abb.4) ....]
Wir hatten ja schon bemerkt, dass das Signal F in Abb. 4 das gleiche ist, wie das Signal A in Abb.8. Somit lässt sich leicht weiter verstehen:
[...Die positiv decodierte Spannungszeit von K1 ist also gleich lang wie die negativ decodierte Spannungszeit. Der Kondensator des Integrationsgliedes 1 erhält somit gleichviel positive wie negative Ladung, er wird folglich weder ge- noch entladen, er sich vielmehr auf ein Nullpotential ein....]
Soweit die Theorie. W. Feulner beschreibt weiter, wie die Praxis bei der 101 aussieht.
[...Da die Ausgangspannungen Us1 ...Us3 auf Batteriemitte bezogen werden, nimmt der Integrationskondensator dieses Ruhepotential, also die halbe Batteriespannung an; mit dieser Ausgangsspannung läuft das betreffende Servo in Neutralstellung. Der Verständlichkeit des Prinzips halber wurde es etwas vereinfacht dargestellt. Tatsächlich arbeiten die Decoderstufen nämlich nicht nicht mit der ganzen Batteriespannung, sondern mit einer etwas geringeren stabilisierten Spannung. Wenn man den Steuerknüppel im Sender bewegt und dadurch die Lage des Kanalimpulses( in Bezug auf den betreffenden Taktimpuls) verändert, ergeben sich unterschiedliche positiv und negativ decodierte Zeiten im Ausgangssignal K1. Die mittlere Kondensatorspannung wird sich gegenüber dem Batteriemittenpotential verändern, das der Integrationskondensator im Mittel mehr positive oder negative Ladung erhält. In der Praxis sieht das dann folgendermaßen aus. Bewegt man den Steuerknüppel z.b. des Seitenruders von einer Extremstellung langsam zur anderen, kann man beobachten, wie die Ausgangsspannung Us1 des Empfangsdecoders (= Steuerspannung für das Seitenruder-Servo) von 2,0 Volt aus ansteigt bis auf 2,5 Volt (was der Batterie-Mittenspannung und gleichzeitig der Steuerknüppelneutralstellung entspricht) und schließlich weiter steigt bis auf 3 Volt. Ein angeschlossenes Servo läuft folglich gleichmäßig mit der Stellung des Sendersteuerknüppels von einer Extremstellung über die Neutralstellung in die andere Extremstellung-- wie es sich für eine Proportionalsteuerung gehört...].
Jetzt wissen wir also wie die 3 analogen Nachlaufservos vom Empfänger angesteuert werden. Weiter wollen wir uns nun dem letzten Kanal K4 einem besonderen Kanal für die Motordrosselfunktion und dem besonderen Fail-Safe Verhalten der Multiplex-101 zuwenden.
[... Bleibt noch die Wirkungsweise der Motordrosselfunktion zu erklären: Die Zeit t4 im Sender-Encoder (Signal F in Abb.4) entspricht der Stellung des Motordrossel-Servos. Diese Zeit wird im im Empfangsdecoder positiv decodiert (Signal K4 in Abb.8). Die restlichen Zeiten des Zyklus werden nicht decodiert und ergeben demzufolge auch keinen Beitrag zur Ausgangsspannung Us4. Durch den Impuls K4 wird der Kondensator im Integrationsglied 4 aufgeladen; in der restlichen Zeit entlädt er sich langsam über einen großen Widerstand. Am Kondensator stellt sich folglich eine mittlere Gleichspannung geringer Welligkeit ein. Wird die Länge des Impulses K4 durch verstellen des Motordrossel-Knüppels im Sender geändert, ergibt sich auch am Integrationskondensator eine andere mittlere Spannung, so dass in Folge das Motordrossel-Servo seine Stellung ändert. Der längste mögliche Impuls für K4 entspricht annähernd der maximalen Übertragungszeit eines Kanals ( ca 6 msec). Damit erreicht die Ausgangsspannung Us4 ihren Maximalwert, wobei das Servo in Stellung "Drossel voll auf" geht. Der andere Extremfall tritt ein, wenn z.b. der Sender ausfallen sollte. Der positiv decodierte Impuls K4 verschwindet dann, weil ja der Empfangszähler nicht mehr angesteuert wird. Der Integrationskondensator erreicht in der Folge seine geringste Spannung mit der das Drossel-Servo in Stellung "voll gedrosselt" läuft....]
Das ist der Fail-Safe Fall, der die Motordrossel am Modell auf Leerlauf bringt.
[... Die 3 Ruder gehen bei einem solchen Senderausfall in Neutralstellung, weil der Zähler nicht mehr läuft und weder positiv noch negativ decodierte Impulse entstehen. Die Ausgangsspannungen Us1 ...Us3 nehmen Batteriemitten-Potential an (automatisches Fail-Safe). ...]
Die 3 Ruder gehen also im Senderausfall in die Neutralposition. Jetzt wollen wir uns noch anhören, was W. Feulner zum Pausendetektor zu berichten kann.
[...Der Pausendetektor in Abb.7b,c dient zur Synchronisierung von Sender und Empfänger; es handelt sich dabei im wesentlichen um ein Zeitglied, das auf die Zeitintervalle zwischen den Impulsen des Zyklus reagiert. Während der 8 Im Zyklus ist der Pausendetektor (auch kurz POD = Pulse Omission Detector) stets ausgeschaltet. Erst im Verlauf der längeren Synchronisierungspause schaltet er ein und gibt einen Rückstellimpuls an alle 3 Stufen des Empfängerzählers. Der erste Impuls des nächsten Zyklus findet nun einen Zähler in der gewünschten Grundstellung vor, so das die richtige Kanalzuordnung erfolgt. Dieser erste Impuls im Zyklus schaltet außerdem den POD wieder aus. ..].
Somit sind wir nun an der Schnittstelle zum Servo selber angekommen. Im nächsten Schritt wird uns nun die Arbeitsweise einen Nachlauf-Servo der Multiplex-101 beschäftigen. Wie die Steuerspannung zustande kommt, haben wir bei den Erklärungen zum Empfänger schon verstehen können. Diese Steuerspannung ist nun die Vorgabe (Sollgröße) für das Servo. Die Elektronik im Servo muss also so arbeiten, dass Sie die Sollgröße nimmt und die Stellgröße (Winkel der Steuerscheibe) einstellt. Wie das genau passiert erfahren wir bei den Servos.
Nach oben
Die Servos:
Generell sind Schaltungen für Servos und Servoverstärker ein eigenes Gebiet, was sehr umfangreich ist. Auch 1965 war das schon so. Im Prinzip geht es aber immer um eine PIDT2 Regelstrecke. PID Regler sind schon aus der Analogtechnik bekannt und vom elektronischen Aufbau mitunter sehr komplex. PID bedeutet Proportionaler-Integraler-Differenzialregler. Wenn man diesen Regler untersucht findet man mathematisch eine Differenzialgleichung 2. Grades, die aufgelöst den Regelprozess und die Einstellgrößen beschreibt. Ich möchte dies hier nicht weiter strapazieren und versuche mich mal an eine triviale Beschreibung der Herausforderung.
Generell möchte man einen Steller, Stellmechanismus, Aktuator, oder Motor auf eine vorgegebene Größe (Sollwert) bringen, wobei der Steller in der Regel diesen Wert momentan nicht hat (Istwert). Da der Sollwert ungleich dem Istwert ist, hat man eine Regeldifferenz. Diese Regeldifferenz muss schnell und genau ausgeglichen werden. Dies ist die Herausforderung.
Folgendes Bild soll das geschriebene Bildhaft verdeutlichen:
Abb.9: PIDT2 Regelverhalten
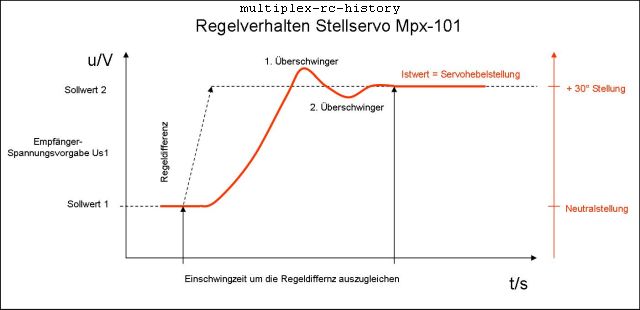
Man sieht, wie sich die Spannung Us1 aus dem Empfänger proportional der Steuerknüppelstellung ändert (schwarze gestrichelte Linie). Das Stellservo (Nachlaufservo) soll nun 1:1 der Sollwertvorgabe folgen "nachlaufen". Wie man an der roten Linie prinzipiell sieht, passiert aber folgendes grundsätzlich. 1. Die Steuerscheibe (rote Linie) wird erst verspätet folgen. 2. Nach dem Anstieg ( soll schnell sein = muss steil erfolgen) auf den Sollwert 2 wird es einen 1. Überschwinger durch die trägen Massen im Servo (Mechanik) geben, nach dem Erkennen wird die Elektronik versuchen den Servomotor umzupolen und erneut einen Regelversuch ( schnell) auf die Sollgröße 2 auszuregeln. Auch hier wird es einen Überschwinger 2 geben, der wiederum von der Elektronik erkannt wird und schließlich in die Nähe des Sollwertes 2 ( asymptotisch PT1 Verhalten) ausgeregelt wird. Dies passiert bei einem stabilen Regler, der ein grundsätzliches Abschwingen voraussetzt.
Wir alle kennen diese grundsätzliche Regeldynamik aus unserem täglichen Erleben in der Natur und Technik.
Es gibt nun sehr viele Stellgrößen, um diesen Herausforderungen zu begegnen. Z.B. kann man die Masse des Motors und der Mechanik entsprechend Massearm gestalten, oder man kann die Regelelektronik so komplex gestalten, dass die Überschwinger minimal werden. Je nach Anspruch und Anwendungsfall gibt es heute Lösungen für diese Herausforderungen.
Abb. 10 soll verdeutlichen, wie eine Elektronik schematisch aussehen muss, um die Herausforderungen bewältigen zu können. Der Elektroniker erkennt hier 2 Operationsverstärker, die verpolt angeschlossen sind, um die Fälle 1 bis 5 unten Bildhaft erklärbar zu machen. Wir haben bei der Multiplex 101 ein Nachlaufservo mit einem Faulhaber Glockenankermotor. Die Steuerscheibe ist auf der Drehachse des Positionspotentiometers aufgeschraubt. Weiter ist auf der Drehachse des Potentiometers ein Antriebszahnrad angeschraubt. Der Motor treibt dieses Zahnrad an und dreht somit das Potentiometer und die Steuerscheibe ( gestrichelte Linien).
Beispielhaft erkläre ich den Fall 1.
Das Servopotentiometer liefert im Servo die Stellspannung Ustell von 2,7 Volt. Der Empfänger liefert die Steuerknüppelspannung Us1 von 2,5 Volt. Die Elektronik wird sofort versuchen die Vorgabe (Sollgröße) von 2,5 Volt mit Hilfe des Motors am Stellpotentiometer einzustellen und verdreht entsprechend das Servopotentiometer auf die Stellspannung von 2,5 Volt. Dort bleibt der Stellmotor stehen. Die Steuerscheibe hat sich entsprechend auf der Potentiometerachse mitgedreht und so die Neutrallage des Servos hergestellt, die bei Us1 = 2,5 Volt ist.
Spielen sie die anderen Fälle entsprechen der Motorpolaritäten mal Gedanklich durch.
Abb.10: Schematische Servoverstärker-Elektronik
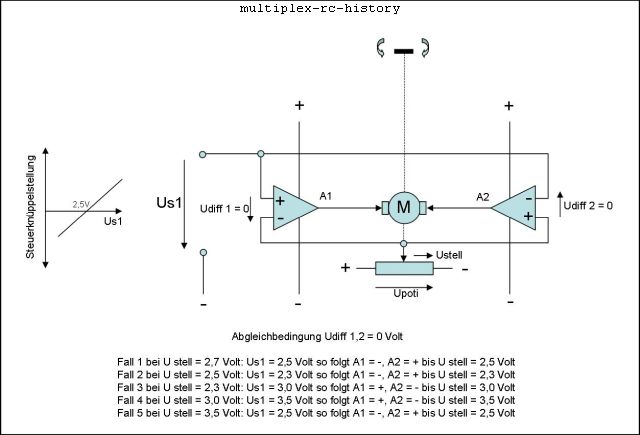
Abb. 11: Servos der Multiplex-101. Schön sind die Zahnräder auf der Potentiometerachse, sowie die Motorritzel zu erkennen. Die Steuerscheiben sind über die Ritzel montiert.
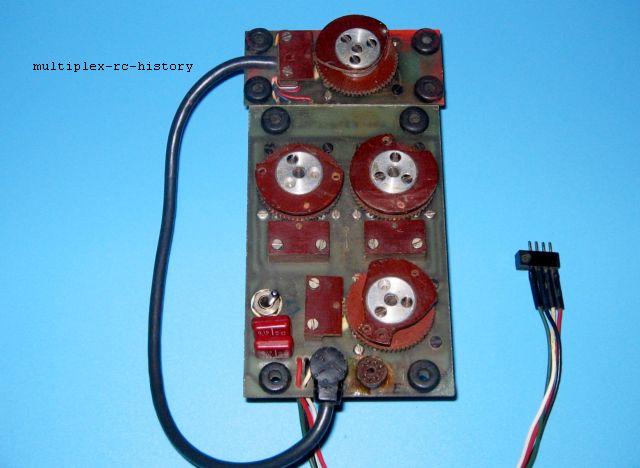
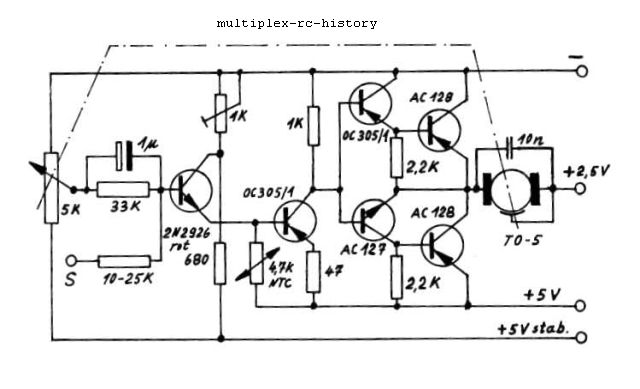
Abb. 12: Schaltplan Nachlaufservo MPX 101 die Konzeption soll von Dieter Braun (minitronik) aus Stuttgart stammen
W. Feulner berichtet folgendes zu den Multiplex-101 Servos:
[...Das Multiplex-Servo arbeitet mit dem Mikro-T05-Motor (Faulhaber) und einem 3 stufigen Servoverstärker (6 Transistoren). Zur Schaltungstechnik des Servos ist wenig zu sagen. Im Laufe der Zeit sind so viele verschiedene Servo-Schaltungen in der Fachliteratur, vor allem in der amerikanischen, beschrieben und auch in industriellen Geräten verwendet worden, dass kaum noch etwas völlig Neues zu erwarten ist, so lange man den Aufwand nicht extrem hoch treiben will....].
W. Feulner beschreibt hier schon die von mir oben angeführten Hinweise zu den PIDT2 Reglern, die gerade vor 1965 intensiv entwickelt wurden. Was W. Feulner noch nicht wusste, das die Mikroprozessortechnik und die Chipentwicklung von heute weitere Technologieschritte möglich macht. Z.B. Verwendung von Gebern jeglicher Art, wie Inkrement, Dekrement, Berührungslose-Geber, schnelle und superschnelle Regelalgorithmen, die man selber programmieren kann, oder sich selbst anpassen können.
So werde ich W. Feulner zu seinen Untersuchungen weiter zitieren:
[... Die Servos der Multiplex-101 arbeiten, wie schon in der Systembeschreibung erwähnt, analog, d.h. mit Spannungsabgleich. Diese Servos sind, war Laufgeschwindigkeit, Auflösung und Ruderkraft betrifft, nachgerade musterhaft. Im Leerlauf, d.h. ohne Ruderdruck, benötigt das Servo ca 0,4 sec, um von einer Extremstellung in die andere zu laufen -- auch eine Digitalservo kann kaum schneller sein. Es tritt dabei nur ein unmerkliches Überschwingen auf, d.h. das Servo läuft ca 0-2% (je nach Exemplar) über die richtige Einstellung hinaus und kehrt dann in diese zurück. Bei einer Belastung von 1,5 cmKg beträgt die Gesamtlaufzeit ca. 1 sec. Ein Überschwingen tritt hier selbstverständlich nicht mehr auf. Die maximal verfügbare Ruderkraft liegt bei 2 cmKg, ein Wert, der durchaus im Rahmen des üblichen liegt....]
[... Die Auflösung der Multiplex-101-Servos wurde in unseren Versuchen zu 1,5% im Leerlauf (ohne Ruderbelastung) ermittelt. Eine Auflösung von 1,5% bedeutet, dass der gesamte Ruderweg von 100% in 1,5% feine Schritte unterteilt werden kann. Bewegt man den Steuerknüppel von einem Vollausschlag zum anderen, so macht das Servo folglich ca 60 kleine Schritte von jeweils 1Grad ( bei 60 Grad Gesamtdrehwinkel). Belastet man das Servo mit 1,5 cmKg, beträgt die Auflösung immer noch 2,5%, so dass noch 40 verschiedenen Stellungen des Servos erreicht werden können....].
[...Das Haltemoment des Servo dürfte schätzungsweise mindestens 4 cmKg betragen. Das dies noch eine echte Servokraft und nicht auf ein Verklemmen des Getriebes zurückzuführen ist, zeigt der Stromverbrauch des Servos, der auf ca 500 mA ansteigt. Ein Servo benötigt ca. 15 mA im Ruhezustand und rund 100 mA während des Laufs ohne Last. Bei Belastung steigt der Stromverbrauch und erreicht bei dem erwähnten großen Haltemoment ca. 500 mA. ...]
Wenn man oben genau gelesen hat findet man einen Servoweg von 60 Grad und die Leerlaufauflösung von 1,5 %. Wir erinnern uns an den Sender an dieser Stelle, der eine Frameverarbeitungszeit von 16,7 ms hat. Das sind 60 Hz. Das heißt die Abtastrate aller 4 Steuerknüppelabfragen erfolgt genau 60 mal pro Sekunde. Somit ist die Auflösung von 1,5 % auch die maximal mögliche Auflösung des Systems, da mehr wie 60 Steuerknüppelinformationen pro Sekunde nicht übertragen werden können.
Nach oben
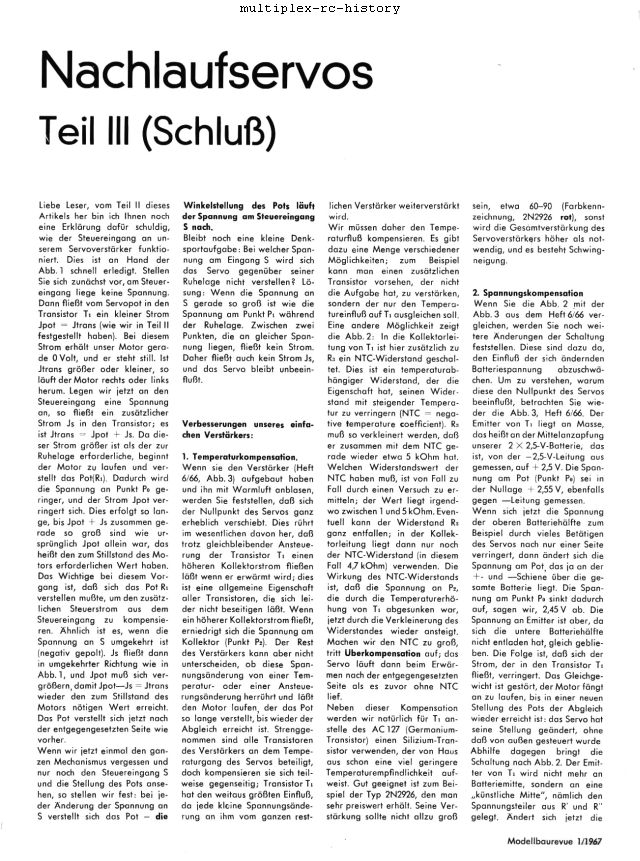
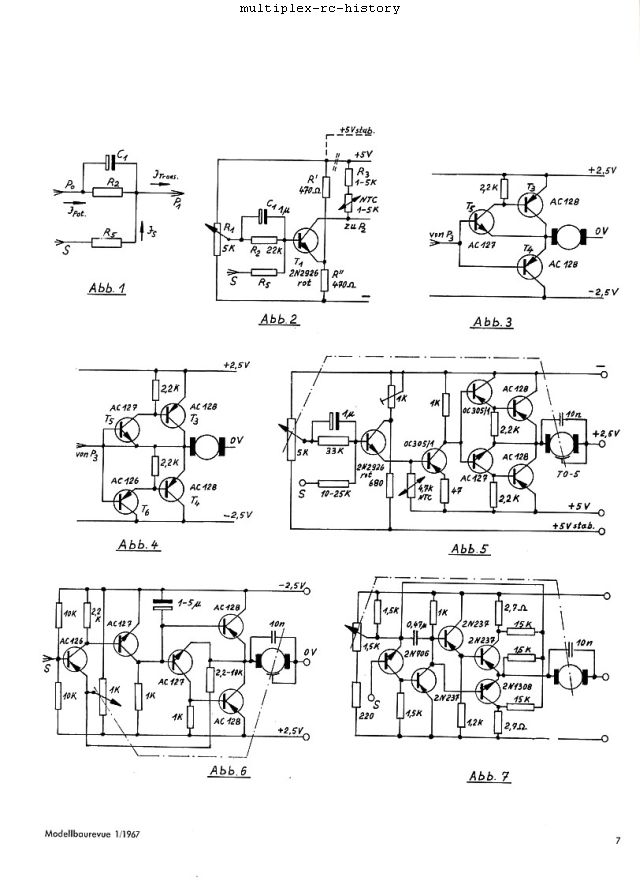
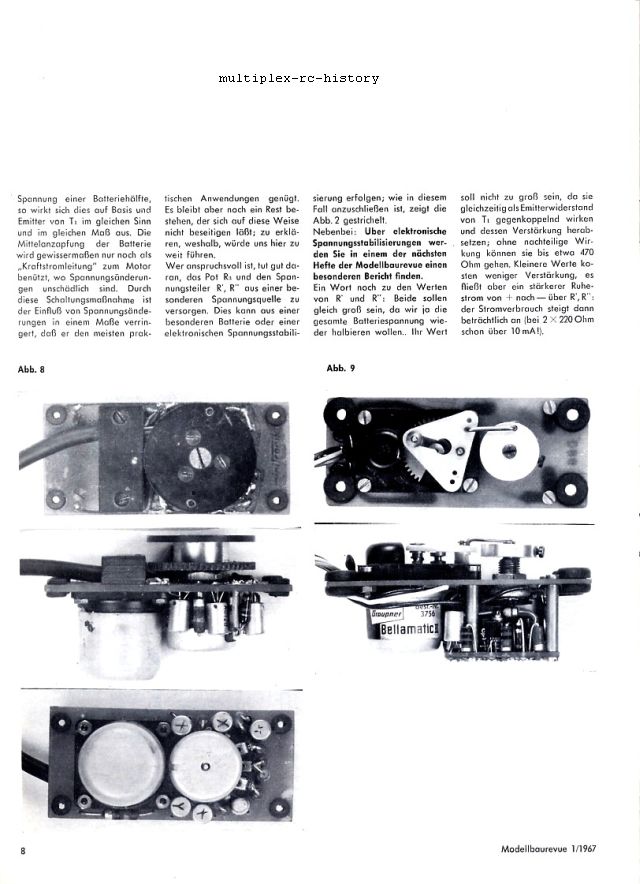
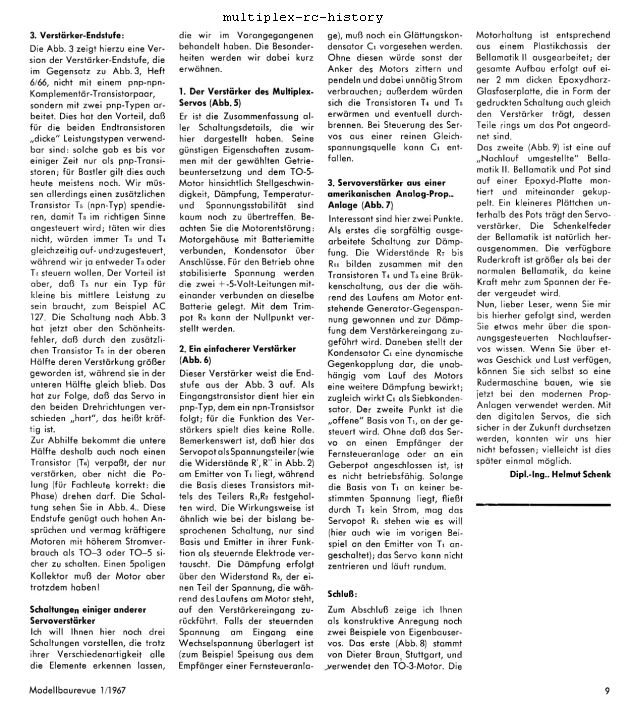
Weiter finden wir eine schöne Abhandlung, wie das Nachlaufservo funktioniert in der Modellbaurevue von 1966/67, welche sehr interessant ist.
Abb. 13: Teil 1 Nachlaufservos von Dipl.-Ing. Helmut Schenk

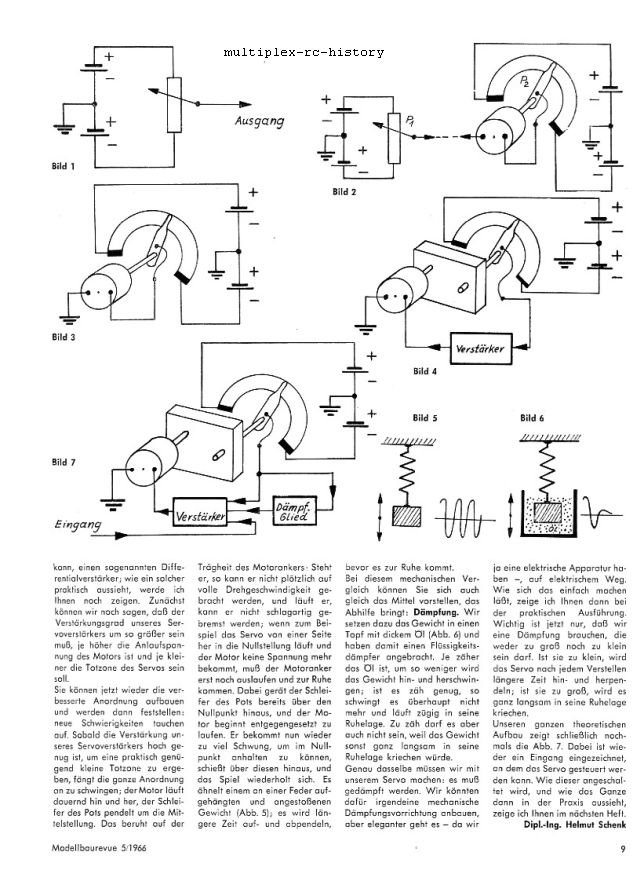
Abb. 14: Teil 2 Nachlaufservos von Dipl.-Ing. Helmut Schenk

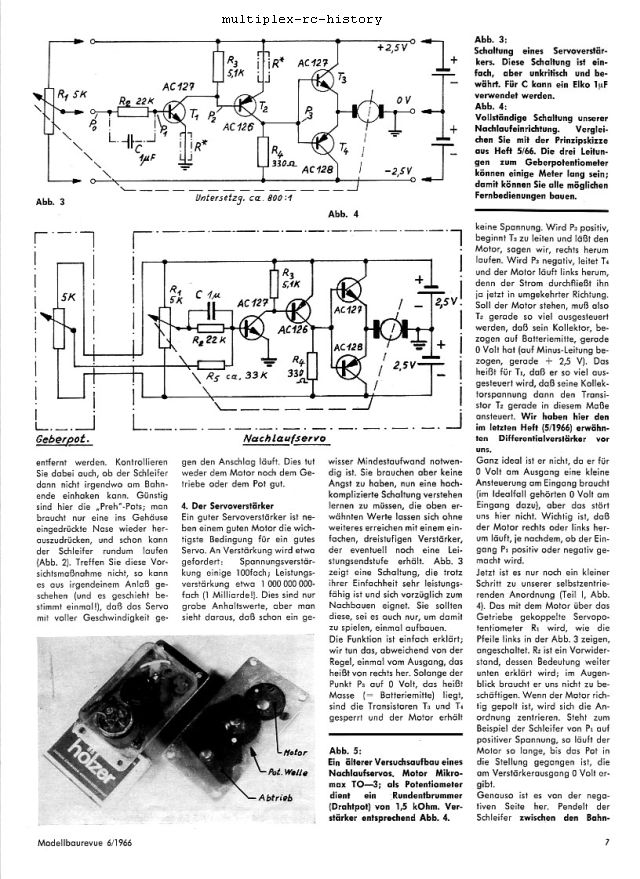

Abb. 15: Teil 3 Nachlaufservos von Dipl.-Ing. Helmut Schenk
nach oben
Die Spannungsversorgung: